жаЙњЧрФъБЈЃКЬьНђДѓбЇзюаТбаЗЂЃК3DДђгЁШэадЈЛњЦїШЫ
жаЙњЧрФъБЈПЭЛЇЖЫЬьНђ1дТ20ШеЕчЃЈжаЧрБЈЁЄжаЧрЭјМЧеп КњДКбо ЭЈбЖдБ СѕЯўбоЃЉ
ЯёвЛжЛСщЧЩЕФГпѓЖЃЌРЮРЮЕизЅзЁдВаЮЙмЃЌдквЛЩьвЛЫѕжађъббЧАааЁЃетЪЧВЩгУЬьНђДѓбЇПЦММЙЄзїепбаЗЂЕФвЛжжаТаЭФЃПщЛЏШсадЧ§ЖЏЗНЗЈВЂгУ3DДђгЁЁЛЛњжБНгЁАДђгЁЁБГіРДЕФШэадЛњЦїШЫЁЃ
ШэадЛњЦїШЫвђЦфНЯИпЕФШсадКЭЖдШЫЬхАВШЋЕШгХЕуЃЌдкНќМИФъЕУЕНСЫГжајЙуЗКЕФЙизЂЁЃЖј3DДђгЁЕФгХЪЦОЭЪЧжЦдьИДдгаЮЬхЁЂИДдгНсЙЙЖјЧвВЛашвЊКѓајМгЙЄЃЌПЩвЛІцДЮГЩаЭЁЃДђгЁУтзщзАНсЙЙЃЌЪЧ3DДђгЁММЪѕжЦдьШэадЛњЦїШЫНќФъРДвЛИіБШНЯЕфаЭЕФгІгУЁЃ
(ЭМЦЌЫЕУїЃКЛљгкБЁФЄЦјИзЕФаТаЭЦјЖЏШЫЙЄМЁЁИШтЩшМЦРэФюМАЦфгІгУГЁОА)
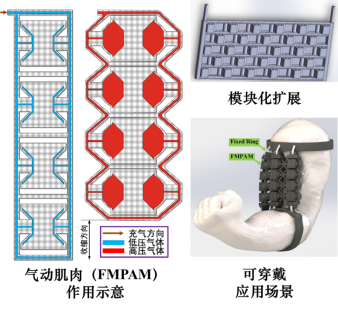
НќШеЃЌЬьНђДѓбЇзѓЫМбѓЁЂСѕНЈБђПЮЬтзщЬсГіСЫвЛжжЛљгкБЁФЄЦјИзЕФаТаЭФЃПщЛЏШсадЧ§ЖЏЗНЗЈЃЌВЂЭЈЙ§ИљОнОпЬхгІгУИФБфХХСазщКЯЗНЪНвдМАКЯРэВМжУЈ}СЌНгЗНАИЃЌНЋЦфгІгУгкШЫЙЄМЁШтКЭЙмЕРХРааЛњЦїШЫжаЁЃИУЗНЗЈЛљгквЛДЮ3DДђгЁГЩаЭЕФжЦдьММЪѕЃЌЪЁЕєСЫДЋЭГЛњЕчЩшБИМгЙЄжЦдьжаЕФзАХфСїГЬЃЌДѓЗљНЕЕЭСЫЧ§ЖЏФЃПщЕФжЦдьГЩБОКЭжмЦкЃЌЧвОпБИКФЦјСПаЁЁЂЖЏЬЌЯьгІИпЁЂПЩППадИпЁЂЖдгІгУЁўГЁОАЪЪгІадЧПЕШЬиЕуЁЃИУГЩЙћ2021Фъ1дТГѕдкЯпЗЂБэдкЁЖУРЙњЕчЦјЕчЁэзгЙЄГЬЪІбЇЛсЛњЦїШЫКЭздЖЏЛЏПьБЈЃЈ IEEE Robotics and Automation LettersЃЉЁЗЩЯЁЃ
(ЭМЦЌЫЕУїЃКЛљгкБЁФЄЦјИзЕФЙмЕРХРааЛњЦїШЫЩшМЦРэФю)
ЁАУПвЛИіБЁФЄЦјИзОЭКУБШШЫЬхЕФвЛаЁПщМЁШтЃЌЛђепЁєХРГцЕФвЛИіЁЎНкЁЏЃЌжЛВЛЙ§ЪЧгУШШЫмадОлАБѕЅВФСЯзіЕФЁЃЁБСѕНЈБђНтЪЭЫЕЃЌВЩгУетжжаТаЭБЁФЄЦјИзНсЙЙЪЧЭХЖгЕФЁАЦцЫМУюЯыЁБЃЌШчЙћАбетИіНсЙЙБШгїГЩвЛИіЛљЁљБОЕФМЁШтЕЅдЊЃЌФЧИљОнВЛЭЌЕФгІгУашЧѓдйЖдетаЉЕЅдЊЕФСЌНгЗНЪННјааХХСазщКЯКЭВМОжСЌНгЃЌОЭЯёЪЧАбвЛИіИіЕФМЁШтЕЅдЊСЌНгЦ№РДаЮГЩвЛећПщМЁШтЃЌШЛКѓдйгІгУгкВЛЭЌГЁОАЃЌЖјећПщЁАМЁШтЁБЕФжЦдьЙ§ГЬ eдђВЩгУСЫ3DДђгЁММЪѕЃЌвЛДЮГЩаЭЁЃ
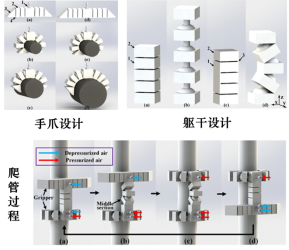
ЛљгкДЫДДвтЃЌПЮЬтзщЪзЯШЬсГіСЫвЛжжаТаЭЦјЖЏШЫЙЄМЁШтЃЌПЩгІгУгкШсадЭтЙЧїРЕШШЫЛњНЛЛЅзАБИЕФЧ§ІЗ ЖЏжаЁЃЦјЖЏМДвдбЙЫѕПеЦјЮЊЖЏСІдДЃЌДјЖЏЛњаЕЭъГЩЩьЈЫѕЛђа§зЊЖЏзїЁЃгыДЋЭГЦјЖЏШЫЙЄМЁШтЯрБШЃЌИУЩшМЦзюЭЛГіЕФЬиЕуЪЧВЛЛсВњЩњКёЖШЗНЯђЕФХђеЭЃЌДгЖјБмЁбУтСЫЖдШЫЬхЕФМЗбЙЁЃДЫЭтЃЌПЮЬтзщЛЙЬсГіСЫвЛжжаТаЭЦјЖЏЙмЕРХРааЛњЦїШЫЃЌПЩгІгУгкЙЄвЕЙмЕРЩшЪЉЕФМьВщКЭЪЕЪБМрПиЁЃИУЙмЕРХРааЛњЦїШЫВЩгУЗТЩњЁМГпѓЖдРэЃЌЭЈЙ§ЧЩУюВМжУБЁФЄЦјИзЕЅдЊжЎМфЕФСЌНгЃЌЪЕЯжЛњЦїШЫдкЙмЕРФкЁЂЭтБкУцХРааЁЃШсадЧ§ЖЏЗНЪНЕФгІгУЪЙИУЛњЦїШЫФмЙЛЪЪгІДѓЗЖЮЇЙмЕРжБОЖЕФБфЛЏЃЌВЂПЩгІЖджБЁОЙмЁЂЭфЙмЁЂЪњЙмЁЂЫЎЦНЙмвдМАИїжжНЧЖШЧуаБЙмгІгУГЁОАЃЌЭЌЪБЛњЦїШЫПЩГаЪмзджи80БЖвдЩЯИКдиЁЃ
вђЮЊВЩгУСЫЦјЖЏЕФЗНЗЈЧ§ЖЏЃЌШэадЛњЦїШЫжЛФмЁ№ЭЯзХГЄГЄЕФЦјЙмЮВАЭЙЄзїЁЃШчЙћНЋДЋИаЦїМЏГЩЕНЩшБИжаЃЌвВОЭФмШЅЕєетаЉЦјЙмЁ§ЮВАЭЃЌЪЙЛњЦїШЫИќЖРСЂОЋжТЃЌЖјетЪЧПЦбЇМвУЧЮДРДЕФХЌСІЗНЯђЁЃ
жаЙњЧрФъБЈЃКhttps://s.cyol.com/articles/2021-01/21/content_18N0g6HY.html?gid=2V1Qqd1E
ЃЈБрМ ГТПЩЃЉ
ЮДОдЪаэВЛЕУзЊдиЃКЖўОХФъЛЊДѓбЇУХЛЇ » жаЙњЧрФъБЈЃКЬьНђДѓбЇзюаТбаЗЂЃК3DДђгЁШэадЛњІЮЦїШЫ
ЯрЙиЭЦМі
- жаЙњНЬг§БЈЃКВЛЭќСЂЕТЪїШЫГѕаФ РЮМЧЮЊЕГг§ШЫЮЊЙњг§ВХЪЙУќЁЊЁЊНЬг§ЯЕЭГИЩВПЪІЩњШШвщЯАНќЦНзмЪщМЧНЬЪІНкживЊМФгяОЋЩё
- РМжнЭэБЈЃКЬьНђДѓбЇЮЊхДВ§ЯиСЊКЯОшдљ518ЭђдЊвНСЦЩшБИ
- ЬьНђаТЮХЃКЬьНђДѓбЇШйЛёЕкЮхНьжаЙњЁАЛЅСЊЭј+ЁБДѓбЇЩњДДаТДДвЕДѓШќН№НБ
- ЬьНђДѓбЇЕкЫФЪЎЮхЦкаТНЎИЩВПОМУЙмРэХрбЕАрОйааПЊбЇЕфРё
- НЬг§ВПИБВПГЄжгЕЧЛЊвЛааЕНЬьНђДѓбЇЕїба
- жаЙњНЬг§БЈЃКаТЙЄПЦНЈЩшЁАЬьДѓЗНАИЁБ2.0ЗЂВМ
- ЁАВЛЭќЁљКЯзїГѕаФЃЌМЬајаЏЪжЧАааЁБЁЊЁЊОХШ§бЇЩчЬьНђЄзДѓбЇКЭИНЪєЖљЭЏвНдКЛљВузщжЏСЊКЯПЊеЙЛюЖЏ
- ББЗНЭјЃКЁАвЛЦћЗсЬяБЁБЙЄвЕЙЄГЬгыОЋвцЙмРэДДаТДѓШќОйаа
- жаНЈАЫОжЁНЛЊББЙЋЫОЯђЬьНђДѓбЇОшдљЗРвпЮязЪ
- бЇаЃТЁжиОйааЧьзЃЕк36ИіНЬЪІНкєпЯпЩЯБэеУЛюЖЏ
- ЮвЪаейПЊЬьНђДѓбЇНЈаЃ125жмФъжїЬтЛюЖЏЗЂВМЛс
- ЬьНђДѓбЇдњЪЕЭЦНјЁАВЛЭќГѕаФЁЂРЮМЧЪЙУќЁБжїЬтНЬг§
- ЬьНђНЬг§БЈЃР ЃКЬьДѓЗЂВМНЈаЃ125жмФъМЭФюЛюЖЏЙЋИцЁЊЁЊШЋЧђЬьДѓШЫаЏЪжжўаЁПЕ
- ЁОаЃБЈЬиИхЁПЁАОлНЙСНЛсЁБ ЬьДѓДњБэжњСІЁіЙњМвНЈЩш ЕнНЛЬсАИНЈбдЯзВп
- аТЛЊЩчЃКЁАбѓНЬЪкЁБЕФжаЙњЩНЧјжЇНЬМЧ
- УПШеаТБЈЃКЁАЬьДѓЕФРёАќЁБвбОМФГіРВЃЁ
- жаЙњНЬг§БЈЃКЙцЗЖИпаЃУќУћЬхЯжФкІюКЪНЗЂеЙвЊЧѓ
- ЮваЃдкНЬг§ЯЕЭГбЇЯАЙсГЙЯАНќЦНзмЪщМЧИјжаЙњЪЏгЭДѓбЇЃЈББОЉЃЉПЫРТъвРаЃЧјБЯвЕЩњживЊЛиаХОЋЩёЪгЦЕЛсвщЩЯзіЕфаЭЗЂбд
- ЬьНђШеБЈЃКЛЏздКРжЎЧщЮЊЗмНјжЎСІЁЊЁЊЮвЪаЙуДѓИЩВПШКжкЪеЬ§ЪеПДЧьзЃДѓЛсжБВЅШШвщЯАНќЦНзмЪщМЧживЊНВЛА
- ЬьНђШеБЈЭЗАцЃКдкЪИжОЗмЖЗжаЦзаДаТЪБДњЕФЧрДКжЎИш
аТЮХЙЋИц
ИпПМеаЩњ
- ЬьНђДѓбЇ2015ФъеаЩњеТГЬ 08-05
- ЬьНђДѓбЇ2016ФъеаЩњеТГЬ 08-05
- ЬьНђДѓбЇ2017ФъеаЩњеТГЬ 08-05
- ЬьНђДѓбЇ2013ФъеаЩњеТГЬ 08-05
бЇаЃРЯЪІ
- КЋЛнЗв
- аЄОлСС
- ПКвЛьЕ
- БЋбхШу
- аЯИЃБЃ
- яњЮАЮф
- ЖХОХСж
- еХЛнУї
- ИпЮФжО
- жмЕТЗс
- ЛєбЧЫЩ
- ЪЗЙњСМ
- ИЖаЁУЗ
- Жау
- ВХМвШ№
- ЮтАЎЙњ
- НЊЪчЛЊ
- ЫяКЦ
- еХцУ
- ЮтжОЧП
- еХЛлгБ
- ЭПЙтБИ
- БЯгёСс
- жьРђФШ
- СѕКЭЦН
- КюеёЕТ
- бюИж
- МжДѓЙІ
- ЫяСМЖЋ
- ТэжЧ
- Эѕе§ХЗ
- жгЫГКЭ
- ЙЈВЪШй
- ЖЯўбр
- аьСЋдЦ
- ЖЁЪїЕТ
- Н№гІСњ
- СѕЧьИж
- ШюгРЗс
- ЬЦЯђбє
- бюбо
- ЮОЭђцѕ
- бюжОЯщ
- ГТаЇчљ
- ЕЫСе
- ВщОЉУё
- СњСњ
- УЋТНКч
- РюЧьУњ
- ГТЫМЗђ