КНПеКНЬьбЇдКЙљЧьНЬЪкдкЛњаЕДЋЖЏгыПижЦбаОПЩЯШЁЕУживЊНјеЙ
ЁЁЁЁНќШеЃЌКНПеКНЬьбЇдКЙљЧьНЬЪкдкздЖЏПижЦШЈЭўЦкПЏAutomaticaЩЯЗЂБэЬтЮЊЁАParametric adaptive control of single-rod electrohydraulic system with block-strict-feedback modelЃЈЛљгкПщзДбЯИёЗДРЁФЃаЭЕФЕЅзїгУИЫЕчвКЯЕЭГВЮЪ§ЁєздЪЪгІПижЦЗНЗЈЃЉЁБЕФбаОПТлЮФЁЃЙљЧьНЬЪкЮЊТлЮФЕквЛзїепЃЌгЂЙњТќГЙЫЙЬиДѓбЇЕчСІЕчзгЙЄГЬбЇдКПижЦЯЕЭГжааФЖЁе§ЬвНЬЪкЮЊИУТлЮФЕФЙВЭЌзїепЃЌББОЉКНПеКНЬьДѓбЇздЖЏЛЏПЦбЇгыЕчЦјЙЄГЬбЇдКзѓзкгёИБНЬЪкЮЊИУТлЮФЕФЭЈбЖзїепЃЌЕквЛзїепЕЅЮЛЮЊЕчзгПЦММДѓбЇЁЃ
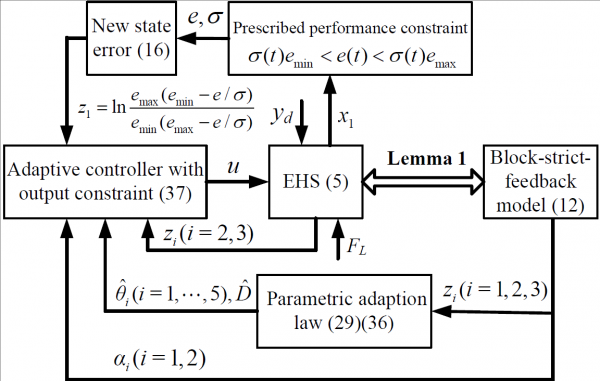
ЭМ1 ЕЅзїгУИЫЕчвКЫХЗўжДааЦїВЮЪ§здЪЪгІПижЦЫуЗЈдРэ

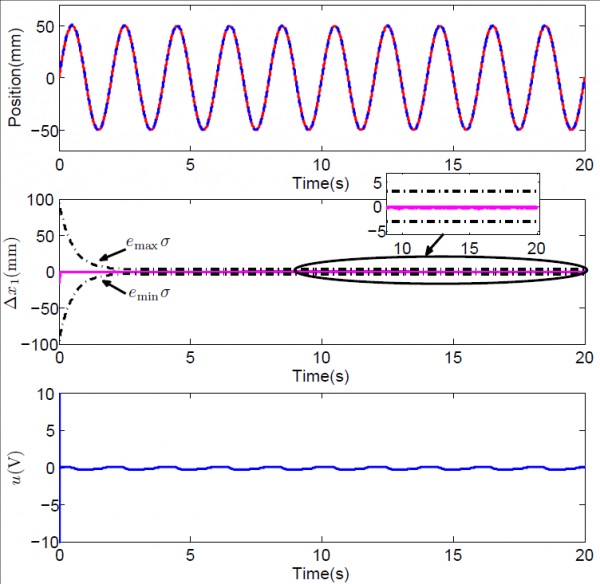
ЭМ2 ЕЅзїгУИЫЕчвКЫХЗўжДааЦїЯЕЭГЪдбщЦНЬЈ
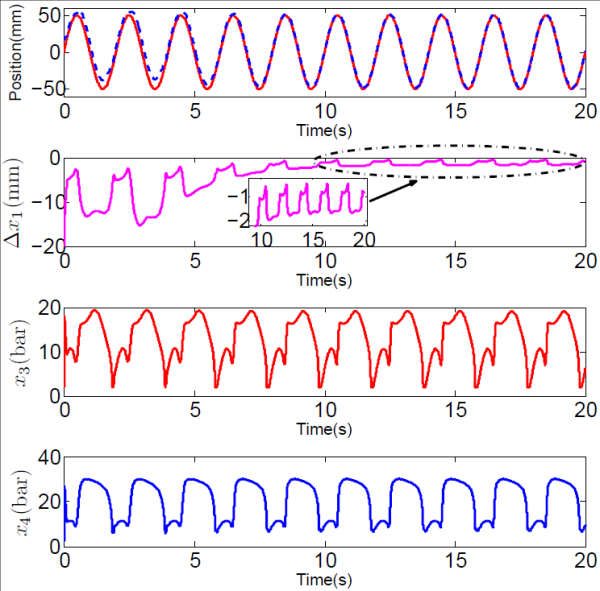
ЭМ3 ЕЅзїгУИЫЕчвКЫХЗўжДааЦїЖдгІЕФВЮЪ§здЪЪгІПижЦЗТецНсЙћ
ЭМ4 ЕЅзїгУИЫЕчвКЫХЗўжДааЈzЦїЖдгІЕФФЃаЭЕШаЇНЕНзПижЦЗТецНсЙћ
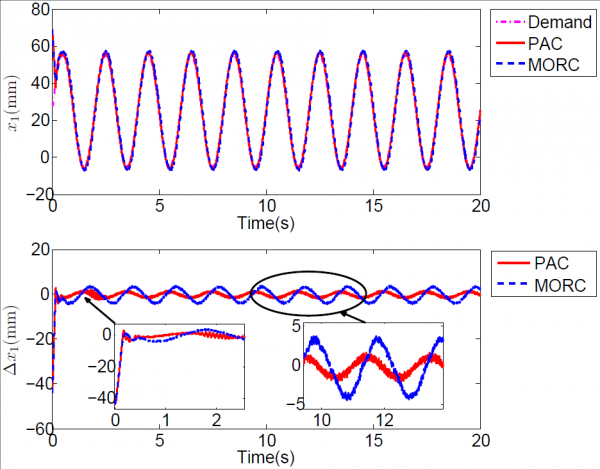
ЭМ5 ВЮЪ§здЪЪгІПижЦгыФЃаЭЕШаЇНЕНзПижЦСНжжЫуЗЈЖдгІЕФБШНЯЪдбщНсЙћ
ЁЁЁЁдкИУбаОПГЩЙћжаЃЌзїепЭиеЙСЫЕчвКЫХЗўПижЦСьгђжЊУћзЈМвЁЂУРЙњЦеЖЩДѓбЇЛњаЕЙЄГЬбЇдКвІБѓНЬЪкдк2000ФъЗЂБэЕФОЕфЮФЯзЃЈYao, B., Bu, F., Reedy, J., & Chiu, G. T. C. Adaptive robust motion control of single-rod hydraulic actuators theory and experiments. IEEE/ASME Transactions on Mechatronics, 2000, 5(1): pp. 79ЈC91, SCIв§гУ364ДЮЃЉжаЬсГіЕФвЛИіЗЧЖдГЦвКбЙжДааЦїЦеЪЪадЙлЕуЃЌМДЗЧЖдГЦвКбЙИзЃЈвВНаЕЅІЮЁЁзїгУИЫвКбЙИзЃЉРэТлФЃаЭДцдквЛИіЮДжЊЕФФкВПЖЏЬЌЃЌЦфЪфГіЕФИКдибЙЧПгЩзѓгвСНЧЛЕФбЙЧПБфЛЏЙВЭЌОіЖЈЃЌПЩвдЖдФЃаЭНјааЕШаЇНЕНз1ЮЌЃЌЕЋЪЧВЛФмЪЕЯжзДЬЌБфСПЕФЯћдЊЁЃЖјЖдГЦвКбЙИзЃЈвВНаЫЋзїгУИЫвКбЙИзЃЉЕФРэТлФЃаЭЯрЖдМђЕЅЃЌПЩвдЭЌЪБЪЕЯжФЃаЭЕФНЕНзКЭзДЬЌБфСПЕФЯћдЊЁЃвђДЫЃЌЗЧЖдГЦвКбЙжДааЦїЕФЖЏЬЌФЃаЭЪЧвЛИіДПЗДРЁЯЕЭГ(pure-feedback system)ЃЌКЌга1ИіШпгрБфСПВЂЧвПижЦСПгыЯЕЭГзДЬЌБфСПУЛгаЗжРыЃЌВЛФмМђЕЅЕШаЇЮЊвЛАуЕФбЯИёЗДРЁЯЕЭГ(strict-feedback system)ЃЌвВОЭЪЧЫЕВЛФмжБНгРћгУЗДВНЕќДњЃЈbackstepping iterationЃЉЗНЗЈРДЪЕЯжПижЦЫуЗЈЩшМЦЁЃ
Нќ20ФъвдРДЃЌЙњФкЭтЯрЙибЇепдкДІРэЗЧЖдГЦвКбЙИзЕФРэТлФЃаЭЩЯЃЌЖМЪЧВЩгУЯШНЋвКбЙИззѓгвСНЧЛЕФбЙЧПЕШаЇЮЊЪфГіИКдибЙЧПЃЌДгЖјЪЕЯж4НзЯЕЭГФЃаЭНЕЮЌЮЊ3НзЃЌВЂРћгУЗДВНЕќДњРДЩшМЦПижЦЫуЗЈЁЃЕЋЪЧИУ3НзФЃаЭжаГ§СЫКЌга3ИіЯЕЭГзДЬЌБфСПЃЈвКбЙИзЮЛжУЁЂЫйЖШЁЂЕШаЇИКдибЙЧПЃЉЭтЃЌШдШЛДцдкШпгрБфСПЃЈвКбЙИззѓгвСНЧЛЕФбЙЧПЃЉЮоЗЈДІРэГЩЯЕЭГзДЬЌБфСПЃЌЭЌЪБвВКЌгаЙигкПижЦСПЕФЗћКХКЏЪ§ЁЃеыЖдетИіРЇШХбЇепвбОУЕФшІДУЮЪЬтЃЌзїепдкТлЮФв§Рэ1жаЃЌРћгУЁтжажЕЖЈРэЃЈMean Value TheoremЃЉжЄУїСЫЗЧЖдГЦвКбЙжДааЦїПЩвдДгРэТлЩЯзЊЛЛЮЊПщзДбЯИёЗДРЁНсЙЙаЮЪНЃЌНЈСЂСЫвЛжжеИаТЕФЗЧНЕНзЕчвКЫХЗўФЃаЭПђМмЃЌМШБмУтСЫФЃаЭЕШаЇНЕНзДјРДЕФЮоЗЈЯћдЊЕФвўЛМЃЌЭЌЪБвВНтОіСЫПижЦСПгыЯЕЭГзДЬЌБфСПЗжРыЕФЮЪЬтЁЃРћгУетИіПщзДбЯИёЗДРЁФЃаЭЃЌеыЖдвКбЙВЮЪ§ВЛШЗЖЈКЭЭтИКдиШХЖЏЕШвђЫиЃЌВЩгУСЫЛљгкдЄЖЈадФмдМЪјЕФВЮЪ§здЪЪгІПижЦММЪѕРДЬсЩ§ЗЧЖдГЦЕчбЙЫХЗўЯЕЭГЕФЪфГіЮЛжУЯьгІадФмЁЃЭЈЙ§ЗТецКЭЪдбщБШНЯЃЌБОЮФЬсГіЕФЛљгкПщзДбЯИёЗДРЁВЮЪ§здЪЪгІЗДВНПижЦЫуЗЈБШВЩгУФЃаЭЕШаЇНЕНзжЎКѓЕФПижЦЫуЗЈгаИќгХдНЕФЖЏЬЌКЭЮШЬЌЪфГіадФмЁЃ
ЁЁЁЁAutomaticaЪЧЙњМЪздЖЏПижЦСЊКЯЛс(IFAC-International Federation of Automatic Control)ЕФЦьНЂЦкПЏЃЌвВЪЧздЖЏПижЦСьгђЙЋШЯЕФШЈЭўЦкПЏЃЌФПЧАЪєгкжаПЦдКJCRвЛЧјЃЌЖдздЖЏПижЦРэТлЕФЯШНјадвЊЧѓКмИпЃЌЭЌЪБвВВПЗжЪеТМПижЦгІгУСьгђЕФДДаТГЩЙћЁЃ
ЁЁЁЁЙљЧьНЬЪкжївЊбаОПЗНЯђЮЊЕчвКЫХЗўПижЦЁЂЭтЙЧїРЛњЦїШЫЃЌНќЮхФъРДжїГжКЭВЮгыЙњМвздШЛЛљН№ЁЂЪЁВПМЖЕШПЦбаЯюФП10грЯюЃЌЗЂБэТлЮФ26ЦЊЃЌ1ЦЊТлЮФШыбЁESIИпБЛв§ЃЌВЂдкЙњМЪГіАцЩчCRC Press, Taylor & FrancisГіАцгЂЮФзЈжј1ВПЃЌЪкШЈЗЂУїзЈРћ5ЯюЃЌзїЙњМЪЛсвщЗжЛсГЁЬибћБЈИц1ДЮЃЌЛёзюМбПкЭЗБЈИцНБ1ДЮЃЌЕЃШЮICAYS2017ЁЂCSAA/IET2018ЁЂICIUS2019ЁЂICMME2019ЁЂ2018ШЋЙњСїЬхДЋЖЏгыПижЦЛсвщЕШЙњМЪЙњФкЛсвщЗжЛсГЁжїЯЏЁЃ
?
ЁЁЁЁТлЮФСДНгЃК
ЁЁЁЁhttps://www.sciencedirect.com/science/article/pii/S0005109820300054
ЮДОдЪаэВЛЕУЁєзЊдиЃКЖўОХФъЛЊДѓбЇУХЛЇ » КНПеКНЬьбЇдКЙљЧьНЬЪкдкЛњаЕДЋЖЏгыПижЦбаОПЩЯШЁЕУживЊНјеЙ
ЯрЙиЭЦМі
- бЇаЃЕГЮЏРэТлбЇЯАжааФзщзЈЬтбЇЯАЕГЕФЪЎОХНьЫФжаШЋЛсОЋЩё
- бЇаЃЛёХњвЛЯюПЦММДДаТ2030-ЁАаТвЛДњШЫЙЄжЧФмЁБжиДѓЯюФП
- ГЩЕчЖЈжЦЭјТчаФРэИЈЕМгыжЇГжЗўЮёЩЯЯп
- ЮваЃНЬЪІЪмбћВЮМгЕкЖўНьжаЙњЮїВиЁАЛЗЯВТэРбХЁБЙњМЪКЯзїТлЬГВЂзїжїжМЗЂбд
- бЇаЃвЛСїБОПЦНЬг§НЈЩшЙЄзїЛсвщПЊФЛ
- бЇаЃТЁжиОйаа2018МЖаТЩњПЊбЇЕфРё
- ГЩЕчШЋЙњЕкЫФЃЁ2015-2019ФъжаЙњИпаЃбЇПЦОКШќЦРЙРНсЙћГіТЏ
- ЙигкзіКУ2020ФъДКМОбЇЦкПЊбЇНзЖЮбаОПЩњНЬбЇгаЙиЙЄзїЕФЭЈжЊ
- ЭѕбЧЗЧЪщМЧдк2018ФъБЯвЕЕфРёЩЯЕФжТДЧ
- ШэМўбЇдКИїбЇЩњЕГжЇВППЊеЙЯпЩЯжїЬтЕГШеЛюЖЏ
- ТРПЫФўНЬЪкЪмЦИЮЊЮваЃЪ§бЇбЇПЦЗЂеЙеНТдзЩбЏЮЏдБЛсЮЏдБ
- бЯХєНЬЪкПЮЬтзщдкЁЖЮяРэЦРТлПьБЈЁЗЩЯЗЂБэбаОПГЩЙћ
- жаЙњИпНЬбЇЛсУРг§зЈЮЏЛсЛсГЄРДаЃЕїбаУРг§ЙЄзї
- ЙўЖћБѕЙЄГЬДѓбЇаЃГЄвІгєРДаЃЗУЮЪ
- 100%ЩюдьЁЂ1/3жБВЉЃЌгЂВХбЇдКБЯвЕЩњајаДЛдЛЭ
- ЕчзгЄзПЦДѓИНЪєвНдКдкЁЖСјвЖЕЖЁЗзгПЏЗЂБэбаОПГЩЙћ
- 63УћЪІЩњЛёЁАЭќВЛСЫЁБКНЬьНБбЇН№ЁЂНБНЬН№
- ЕчзгПЦДѓОйааЁАжТЁЄдЖЗНЁБаТФъЭэЛсЯВг2019
- бЇаЃОйаа2019ФъГЩЕчНмГібЇЩњЃЈБОПЦЩњЃЉД№БчЛс
- НЬЪІЗЂеЙжааФОйЁЬаа2020ФъНЬЪІЙЋХЩГіЙњЯюФПаћНВгыНЛСїЛс
аТЮХЙЋИц
ИпПМеаЩњ
- ИёРЫЙИчбЇдК2015еаЩњМђеТ 08-05
бЇаЃРЯЪІ
- уЦьП
- аьУєЛн
- еХгТ(ЕчЙЄ)
- АзаТдО
- ЛЦКЃ
- уЦЛнСж
- ЩлЛГзк
- ЮФбЇ
- ЮтЕТчї
- ЕЫКъ
- жмЪРНм
- ХэдіЪй
- ТГЯўОќ
- ыјгБ
- ЫяНЃ
- вІСаУї
- ЬРРіЯМ
- Н№Кь
- гкгРБѓ
- НЏКщДЈ
- РюцТ
- еХРћбЋ
- вќЯдгю
- РюЩйЧЋ
- ТэдЦЛд
- жЃНЈГЩ
- КњПЦ
- Ч№жОНм
- ЖдѓЛД
- КЮДяШй
- УЯЧьдЊ
- ЬйБІЛЊ
- еВУњжм
- жмФЯ
- AllenJ.Morrison
- ЛЦеёФЯ
- ЭѕОЉУЗ
- СѕгР
- бюЯМ
- РюЙІСж
- КЋвЂ
- бюЪЫЧх
- СѕЯўдЦ
- ЫЙХЫШћ
- аэМвЋ}
- ЖдЦЭЅ
- УіЗВ
- WangAihua
- вЂЕТжа
- ГТейгТ